тема 13. механіка тіла – баланс. ергономічне рівняння тема 4 поняття механіки тіла людини та параметри її опису
План
- Біомеханіка опорно-рухової системи.
- Біомеханічна система, біомеханічні пари та біокінематичні ланцюги.
- Ступені вільності в біокінематичних ланцюгах.
- Біомеханічні характеристики руху людського тіла
- Кінематичні характеристики
- Динамічні характеристики
- Інерційні характеристики
1 Біомеханіка опорно-рухової системи
«Наука механіка тому така благородна і більш корисна, ніж інші науки, що, як виявляється, усі живі істоти, які мають здібність до руху, діють за її законами» – казав свого часу Леонардо да Вінчі.
Рухова діяльність людини потребує узгодженої роботи організму в цілому, але головна роль при цьому належить опорно-руховому апарату.
З механічної точки зору руховий апарат людини являє собою механізм, який складається з системи важелів, що приводяться у дію м’язами. Тобто людина – це система рухомих з’єднаних ланок, які мають деякі розміри, масу, моменти інерції і м’язові двигуни. Анатомічними структурами, які створюють ці ланки і з’єднання, є кістки, сухожилля, м’язи і фасції, фіброзні та синовіальні з’єднання кісток, а також внутрішні органи, шкіра та інше.
Для того, щоб зрозуміти влаштування рухового апарату і принцип його дії, необхідно враховувати біологічну природу «механізмів» тіла людини. Аналіз діяльності рухового апарату з біологічної точки зору дозволяє розкрити своєрідність принципу дії «живих механізмів» по відношенню до «неживих» механізмів.
Головні біологічні особливості, які відрізняють руховий апарат тварин і людини від неживих технічних механізмів, полягають у наступному:
1. Апарат руху живих істот побудований з живих тканин і органів, у яких постійно, в тому числі і у стані спокою, відбувається обмін речовин. Структурною і функціональною основою живої матерії є білок – складна, хімічно активна і нестійка речовина. Хімічні перебудови білкових молекул, які вступають у різні реакції з органічними та неорганічними речовинами, є основою внутрішньоклітинного обміну речовин і специфічної робочої діяльності клітин (наприклад, скорочувальної).
2. Для підтримання тканин і органів рухового апарату в стані високої працездатності необхідно їх постійно використання, бо тривале перебування у стані спокою знижує працездатність. Тобто під впливом роботи маємо морфологічне і функціональне вдосконалення тканин і органів рухового апарату і, навпаки, деградацію – при відсутності діяльності. Це є важливою відмінністю рухового апарату живих організмів від неживих.
3. У техніці усі рухи є наперед заданими самою формою сполучень між рухомими частинами. Навпаки ж, руховий апарат людини побудовано таким чином, що з одних і тих самих структурних одиниць (кістки, зв’язки, м’язи) може бути утворена різноманітність механізмів з різними робочими завданнями (тобто одні й ті ж самі структурні одиниці є спроможними виконувати різні завдання).
4. Управління діяльністю опорно-рухового апарату здійснюється через нервову систему, яка спрямовує його рух у необхідному напрямку. Рухову діяльність людини можна представити як систему безумовних і умовних рефлексів на подразнення із зовнішнього і внутрішнього світу, які діють у даний час або які діяли раніше і що збереглися у нервових центрах у вигляді сліду. Таким чином, рухова діяльність забезпечується не лише роботою безпосередньо опорно-рухового апарату, але й роботою органів чуття і центральної нервової системи.
Саме рефлекторний механізм і, особливо, здатність до утворення тимчасових зв’язків (умовних рефлексів), забезпечує широке використання одних і тих самих структур рухового апарату для виконання різних рухових дій. Тому саме нервова діяльність визначає робоче застосування рухового апарату, як органу біологічно цілеспрямованих рухів.
2 Біомеханічна система, біомеханічні пари та біокінематичні ланцюги
При вивченні рухів людини потрібно добре знати, як, з точки зору біомеханіки, побудований його опорно-руховий апарат, тобто чітко уявляти принципи будови його пасивної(кістки та їхня сполучання) і активної (м’язова система) частин. На відміну від анатомії, яка вивчає усі деталі будови тіла, для біомеханіки важливо знати саме ті особливості будови, від яких залежать властивості органів опори та руху, а також участь у виконанні рухової функції.
При біомеханічному дослідженні неможливо врахувати будову і функції тіла з усіма його особливостями. Для вивчення рухів будують модель тіла – біомеханічну систему . Біомеханічна система має основні властивості, які є істотними для виконання рухової функції, і не включає в себе поодинокі окремі деталі. Біомеханічна система – це спрощена копія, модель тіла людини, на якій можна вивчати закономірності рухів (рис. 3, 4).
Існують моделі Фішера, Абалакова.
Біомеханічна система –це сукупність живих об’єктів (органів, тканин), які характеризуються загальними особливостями при проявах законів механічного руху, а також загальними особливостями способів управління ними, участі в цих рухах або в їх використанні.
Складовими частинами біомеханічної системи є біокінематичні ланцюги – ланцюги між багатьма частинами тіла, що рухомо з’єднані. До цих ланцюгів прикладаються сили (навантаження), які викликають деформацію і зміну рухів. Біокінематичний ланцюг – це послідовне з’єднання ряду біокінематичних пар.
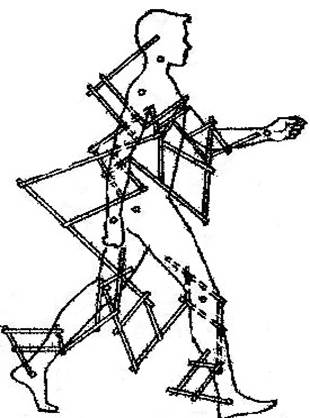
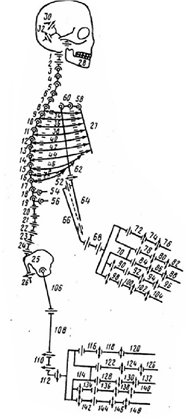
Рисунок 3 – Модель Фішера Рисунок 4 – Структурна схема дослідження рухів людини опорно-рухового апарату людини
(за А. Morecrietal, 1981).
Біокінематична пара– це рухоме (кінематичне) сполучення двох кісткових механізмів, у якому можливості рухів визначаються будовою цього з’єднання і управляючим впливом м’язів.
У біокінематичних парах рухового апарату людини з’єднання двох ланок здійснюються таким чином, щоб створити лише наперед задані (визначені) рухи. Це забезпечується ступенями вільностіокремих ланок і організму в цілому, що і визначає направленість руху.
Суттєвим є те, що кількість з’єднань ланок і кількість ступеней вільності живого організму набагато перевищує те, з чим має справу теорія механізмів і машин (тобто є більшою, ніж 1).
3. Ступені вільності в біокінематичних ланцюгах
Кожна біокінематична пара володіє тією чи іншою кількістю ступенів вільності, що і визначає рухові можливості організму. Взагалі, число ступенів вільності ланки відповідає кількості її незалежних переміщень (лінійних та кутових).
З курсу механіки відомо, якщо на фізичне тіло не накладається ніяких обмежень (в’язів), то воно може рухатися в напрямку усіх трьох взаємно перпендикулярних осей поступально. Тому таке тіло має 6 ступенів вільності.
Кожен зв’язок, що накладається, зменшує кількість ступенів вільності:
- зафіксувавши одну точку вільного тіла зразу відбирають у нього 3 ступені вільності (можливих лінійних переміщень відносно основних трьох координатних осей); приклад: шароподібний суглоб, у якому зменшилася кількість ступенів вільності до трьох;
- закріплення двох точок тіла відповідає фіксації його на осі, що проходить крізь ці точки – залишається одна ступінь вільності;
- закріплення трьох точок повністю відбирає у тіла можливість руху;
- тому таке з’єднання до суглобів не відноситься.
До суглобів з трьома ступенямивільності відносяться шароподібні суглоби, де можливі рухи у наступних напрямках: поворот; приведення і відведення у фронтальній площині; згинання та розгинання. Такими суглобами є: плечовий, тазостегновий.
До суглобів з двома ступенямивільності відносяться: колінний суглоб (який припускає згинання і розгинання, а також деякий поворот голені відносно стегна), зап’ястно-п’ясний суглоб великого пальця кисті руки і деякі інші.
Суглобами з одним ступенемвільності є плече, ліктьовий, міжфалангові суглоби пальців, сочленіння стопи з великою берцовою кісткою.
Кількість ступенів вільності кінематичного ланцюгу опорно-рухової системи людини дорівнює числу незалежних джерел енергії, необхідних для приведення у рух тієї чи іншої ланки відносно відповідної осі обертання суглобу .
Потрібно зауважити, що достовірно назвати кількість ступенів неможливо.
Найсуттєвішим є те, що майже в усіх суглобах ступенів вільності більше, ніж у механізмах (тобто більше ніж 1).
З одного боку, устрій пасивного апарату людини (кістки, суглоби) створює невизначеність руху, а з іншого м’язи (їх управляючі рухи) накладають додаткові ступені зв’язкуі залишають необхідну кількість ступенів вільності. Так і забезпечується необхідна можливість рухів. Таким чином, м’язи – це той апарат, що забезпечує управління рухами і спрямовує рух у наперед заданому напрямку. Крім того, своєрідність процесів управління рухами людини зумовлена також особливостями м’язової системи, як системи двигунів, що перемагають зайві ступені вільності.
Зрозуміло, що нервово-м’язове управління рухами, яке полягає в зменшенні цих ступенів вільності, сильно відрізняється від систем управління у техніці.
Розрізняють замкнені та незамкнені біокінематичні ланцюги.
У незамкненихланцюгах є остання («вільна») ланка, котра входить до складу лише однієї пари; у цих ланцюгах немає вільної кінцевої ланки, кожна ланка входить у дві пари. У незамкненому ланцюзі можливі ізольовані рухи у кожному окремо взятому суглобі. При цьому можливість ізольованого руху не виключається будовою незамкнутого ланцюга, бо рухи біокінематичних ланцюгів у рухових діях зазвичай відбуваються одночасно у багатьох суглобах.
У замкненомуланцюзі ізольовані рухи в одному суглобі неможливі, бо обов’язково при цьому у рух залучаються й інші з’єднання.
Незамкнений ланцюг може стати замкненим, якщо вільна кінцева ланка отримає зв’язок (опору, захват) з іншою ланкою ланцюга чи безпосередньо, чи через будь-яке тіло. Наприклад, вільна кінцівка (руки, ноги) являють собою незамкнений ланцюг. Дві ноги через таз є замкненим ланцюгом через опору. Постійно замкнений ланцюг: грудина-ребро-хребет-ребро-грудина. Дві ноги можуть замкнути ланцюг через опору, наприклад, у положенні випаду.
Значна частина незамкнених біокінематичних ланцюгів оснащена багатосуглобними м’язами. Тому рухи в одних суглобах через такі м’язи більш чи менш пов’язані з рухами в сусідніх суглобах. Однак при точному управлінні в багатьох випадках цей взаємний зв’язок можна виключити, перебороти. В замкнених ланцюгах такий зв’язок є непереборним, і дії м’язів передаються на віддалені суглоби. Так, при упорі лежачи, розгинаючи руки з положення, коли плечі розімкнуті у плечових суглобах можна тягою згиначів плеча (передня частина дельтовидного м’язу) допомагати трьохглавому м’язу плеча розгинати ліктьовий суглоб. Також можна тягою інших м’язів (великий грудний м’яз спини) допомагати трьохглавому м’язу плеча.
Інший приклад. Коли ноги знаходяться у незамкненій системі, двосуглобні м’язи (півсухожильний, півперепончатий, довга голівка двоглавого м’язу стегна), які проходять ззаду поперечної вісі колінного суглобу, згинають його; при відштовхуванні від опори (система замикається) ці ж м’язи, розгинаючи тазостегновий суглоб, вже розгинають колінний суглоб.
4 Біомеханічні характеристики руху людського тіла
У біокінематичних ланцюгах тіла людини рух може передаватися від ланки до ланки. Наприклад, рух кисті руки при підйомі якогось вантажу може бути результатом руху ноги і тіла, а також руху у суглобах руки.
Рух кисті, в цьому випадку, складається з сукупності рухів інших ланок. Тому цей рух є складнимрухом, і для його аналізу застосовуються усі принципи складного руху твердого тіла.
Поступальним називається такий рух, при якому всі точки тіла переміщаються по однакових траєкторіях. При обертовому русі точки тіла, що рухаються, переміщаються по кругових траєкторіях, центри яких лежать на осі обертання.
Але в більшості рухів людини поступальний і обертовий компоненти присутні одночасно, такі рухи називаються складними. Причому руховий апарат людини улаштований так, що всі рухи (у тому числі і поступальні) утворюються з комбінацій обертальних рухів у суглобах.
Біомеханічні характеристики описують поступальні й обертальні рухи (табл. 1).
Таблиця 1 – Класифікація біомеханічних характеристик
|
Кінематичні |
Динамічні |
Енергетичні |
||
|
Для поступальног о руху |
Для обертального руху |
Для поступального руху |
Для обертального руху |
Для поступального та обертального руху |
|
Переміщення – S, м |
Переміщення – φ, рад (град) |
Маса – m,кг |
Момент інерції – I mR2, кг·м 2 |
Робота – А, Дж |
|
Тривалість – t, с |
Тривалість – t, с |
Сила – F, Н |
Момент сили – M(F)=FS, Н·м |
Енергія – Е, Дж Для поступального руху: E mv22, Для обертального руху: E I22 |
|
Швидкість – v, м/с |
Швидкість – ω, рад/с (град/с) |
Імпульс сили – I=FS, Н·с |
Імпульс моменту сили – I=M(F), Н·м·с |
Потужність, Вт |
|
Прискорення – a, м/с 2 |
Прискорення – ɛ, рад/с (град/с) |
Кількість руху, (кг·м)/с |
Кінетичний момент, (кг·м2)/с |
Економічність – коефіцієнт механічної ефективності, % |
|
Темп – 1/хв |
Темп – 1/хв |
Енергетична вартість , Дж/м |
||
|
Ритм |
Ритм |
Пульсова вартість, 1/м |
||
Рухи людини мають різне призначення: кінематичні – характеризують зовнішню картину рухової діяльності; динамічні – несуть інформацію про причини змін рухів; енергетичні – дають уяву про механічну продуктивність і економічність. Розглянемо їх детальніше.
5 Кінематичні характеристики
Кінематика рухів визначає геометрію (просторову форму) рухів та їх зміни у часі (характер) без урахування маси і діючих сил.
Вона дає в цілому лише зовнішню картину рухів. Кінематичні характеристики тіла людини та його рухів – це міри положення і руху людини у просторі і у часі:
- просторові;
- часові;
- просторові-часові.
Просторові характеристики дозволяють визначити вихідне положення, із якого рух починається і кінцеве положення, в якому рух закінчується (по координатах), а також визначити власне рух тіла (по траєкторії).
У прямолінійному русі траєкторія (вектор) не змінюється і шлях визначається відстанню по прямій між кінцевим і початковим положенням тіла – лінійне переміщення (∆S). Лінійне переміщення вимірюється в одиницях довжини (метрах).
У криволінійному русі напрямок змінюється і шлях визначається відстанню по траєкторії між кінцевим і початковим положенням тіла з урахуванням кривизни траєкторії.
В обертальних рухах точки тіла переміщуються по дугах кола, центри яких лежать на осі обертання. Таке переміщення називають кутовим. Кут повороту тіла або окремого сегмента (кутове переміщення (∆φ) виміряється в градусах.
Часові характеристики розкривають рух у часі:
- коли він почався і закінчився (момент часу);
- як довго тривав (тривалість руху);
- як часто виконувався рух (темп);
- як він був побудований у часі (ритм).
Момент часу – часова міра положення точки тіла і системи. Момент часу визначають не лише для початку і закінчення руху, але й для визначення часу закінчення одної фази руху і початку наступної (наприклад, відрив стопи від опори під час бігу – це момент закінчення фази відштовхування і початку фази польоту). За моментами часу визначають тривалість руху.
Тривалість руху – це його часова міра, яка вимірюється різницею моментів часу початку і закінчення руху. Якщо відома тривалість руху і відстань, яку пройшла точка, можна визначити її швидкість. Знаючи тривалість руху, визначають також його темп і ритм.
Темп рухів – це часова міра їх повторності. Він вимірюється кількістю рухів, які повторюються в одиницю часу (частота рухів). Темп – величина, зворотна тривалості рухів. Чим більша тривалість руху, тим менший темп, і навпаки. У циклічних видах спорту темп може бути показником досконалості техніки.
Ритм рухів – це часова міра співвідношення частин рухів. Він визначається по співвідношенню тривалості частин рухів. Ритм рухів характеризує співвідношення фаз рухової дії, наприклад, співвідношення часу опори і часу польоту під час бігу або часу амортизації (згинання коліна) і часу відштовхування (випрямлення ноги) при опорі.
Просторово-часові характеристики визначають, як змінюються положення і рухи людини у часі, як швидко людина змінює свої положення (швидкість) і рухи (прискорення).
Швидкість точки – це просторово-часова міра руху точки (швидкості зміни її положення). Швидкість – величина векторна, вона характеризує швидкість руху і його напрямок.
Прискорення точки – це просторово-часова міра зміни руху точки. Прискорення – величина векторна, вона характеризує бистроту зміни швидкості за її величиною і напрямком у даний момент.
6 Динамічні характеристики
Динамікарозглядає вплив взаємодії між тілами на їхній механічний рух. На відміну від кінематичних характеристик динамічні не можна оцінити за зовнішньою картиною. Тут завжди потрібна вимірювальна апаратура. Ці характеристики вимірюють тому, що саме вони допомагають розібратися зі складним механізмом формування рухів, розкрити причини зміни рухів, механізм рухів .
До динамічних характеристик відносяться:
1. Інерційні характеристики (особливості тіл, що безпосередньо рухаються).
2. Силові характеристики (особливості взаємодії тіл).
7 Інерційні характеристики
Інерційні характеристикирозкривають особливості тіла людини при взаємодії з іншими тілами. Від інерційних характеристик залежить збереження і зміна швидкості руху тіла.
Інертність – властивість фізичних тіл, яка проявляється у поступовій зміні швидкості з плином часу під впливом сил.
Усі фізичні тіла мають властивість інертності, яке проявляється в збереженні руху, а також в особливостях зміни його під дією сил.
Мірою інертностітіла при поступальному русі є маса. Чим більшою є маса тіла, тим більш важко вивести його зі стану спокою або змінити його рух.
Кількісною мірою інертності тіла при обертальному русі служить момент інерції. Момент інерції тіла – це міра інертності тіла при обертальному русі.
При обертальному русі інертність людського тіла залежить не тільки від маси, але і від пози.
На рисунку 5.зображено фігуристку, що виконує обертання. На рис. 5.(А)спортсменка обертається швидко і виконує близько 10 обертів в секунду. У положенні, яке зображено на рис.5. (Б), обертання різко уповільнюється і потім зупиняється. Це відбувається тому, що, відводячи руки в боки, фігуристка робить своє тіло більш інертним: хоч маса (m) залишається тією ж, збільшується радіус інерції (Ri) і, відповідно, момент інерції.
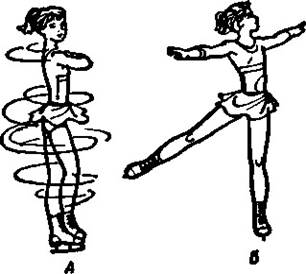
Рисунок 5 – Затримання обертання при зміні пози
При дослідженні рухів нерідко буває потрібно враховувати не лише величину маси, але й її розподіл у тілі. На розподіл матеріальних точок у тілі вказує місце розташування центра мас тіла.
Центр мас– це ділянка, де перетинаються лінії дії усіх сил, що приводять тіло у поступальний рух і які не викликають обертання тіла. У полі гравітації (коли діє сила ваги) центр мас співпадає з центром ваги.
Центр ваги– точка, до якої прикладено рівнодіючу силу ваги усіх частин тіла.
Усі зазначені характеристики (маса, радіус інерції, момент інерції, координати центру мас) описують розподіл мас між ланками тіла і всередині самих ланок. У цілому ці характеристики мають назву геометрії мас тіла людини.
Енергетичні характеристики показують, як змінюються види енергії під час рухів і відбувається власне процес зміни енергії.
Енергетичні характеристики – робота сили, потужність сили, механічна енергія тіла – кінетична і потенційна. Більшість з енергетичних характеристик обчислюється з кінематичних і динамічних характеристик. Так, механічна робота є добуток сили на переміщення.
Наприклад, для того щоб піднятися по канату на висоту 5 м, хлопчик з масою тіла в 30 кг виконує роботу близько 1500 Дж:
30 кг·9,8 м/с2 ·5 м≈ 300 Н · 5 м = 1500 Дж.
Якщо цей підйом тривав 10 с, то потужність, яку розвиває хлопчик становитиме 1500 Дж : 10 с = 150 Вт.
Механічна робота, яка виконується людиною витрачається на збільшення потенційної (енергія положення тіла) і кінетичної (енергія механічного руху тіла, яка визначає можливість виконати роботу) енергії людського тіла, спортивних снарядів й інших предметів.
До енергетичних характеристик належить:
1. Енергетична вартість метра шляху або одиниці корисної роботи. Для того щоб визначити енергетичну вартість бігу, потрібно розділити швидкість витрат метаболічної енергії на швидкість бігу.
2. Пульсова вартість метра шляху або одиниці корисної роботи; наприклад, пульсова вартість ходьби, бігу й інших циклічних локомоцій.
Опорно-руховий апарат людини містить біля 70 ланок. Але такого досконалого опису геометрії мас взагалі не потрібно. Для розв’язку більшості практичних задач достатньо 15-ланкової моделітіла людини (рис.6). У 15ланковій моделі деякі ланки складаються з деяких елементарних ланок. Тому такі збільшені ланки мають назву сегментів .
Наведені на рисунку значення є вірними для «середньої людини», вони отримані шляхом усереднення результатів дослідження багатьох людей. Індивідуальні особливості людини, і в, першу чергу, маса і довжина тіла, впливають на геометрію мас.
Визначення маси ланки за методом відносних мас. Масу ланки визначають зазвичай за її відносною вагою (у відсотках до ваги усього тіла людини). У людей різної статі, віку і будови тіла ці співвідношення, зрозуміло, є різними. Однак у дорослих чоловіків і жінок відносні ваги є достатньо близькими.
При орієнтованих розрахунках прийнято вважати масу голови, що дорівнює 7 % від маси тіла, тулуба – 43 %, плеча – 3 %, передпліччя – 2 %, кисті – 1 %, стегна – 12 %, гомілки – 5 %, стопи – 2 %.
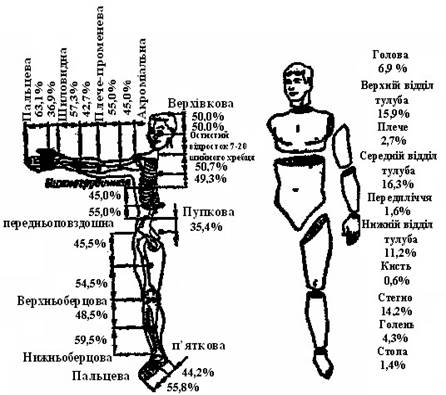
Рисунок 6 – П’ятнадцяти ланкова модель тіла людини (зліва – місця розташування ЦТ ланок, справа – відносні ваги ланок опорно-рухового апарату людини)
Наприклад,маса кисті: – 0,12 + 0,004 × 60 + 0,002 × 170=0,46 кг.
Знаючи маси і моменти інерції ланок тіла і де розташовані їх центри мас, можна вирішити багато важливих і практичних задач. У тому числі:
- визначити кількість руху, що дорівнює добутку маси тіла на його лінійну швидкість (m v);
- визначити кінетичний момент, що дорівнює добутку моменту інерції тіла на кутову швидкість (Jw); при цьому необхідно враховувати, що величини моменту інерції відносно різних осей є неоднаковими;
- оцінити, чи легко керувати швидкістю тіла або окремої ланки; визначити стійкість тіла тощо.
Таблиця 2 – Коефіцієнти рівняння для розрахунку маси сегментів тіла по масі (m) і довжині (H) тіла
|
Сегменти |
Коефіцієнти рівнян |
ня |
||
|
B 0 |
B 1 |
B 2 |
||
|
Стопа |
– 0,83 |
0,008 |
0,007 |
|
|
Гомілка |
– 1,59 |
0,036 |
0,012 |
|
|
Стегно |
– 2,65 |
0,146 |
0,014 |
|
|
Кисть |
– 0,12 |
0,004 |
0,002 |
|
|
Передпліччя |
0,32 |
0,014 |
– 0,001 |
|
|
Плече |
0,25 |
0,030 |
– 0,003 |
|
|
Голова |
1,30 |
0,017 |
0,014 |
|
|
Верхня частина тулуба |
8,21 |
0,186 |
– 0,058 |
|
|
Середня частина тулуба |
7,18 |
0,223 |
– 0,066 |
|
|
Нижня частина тулуба |
– 7,50 |
0,098 |
0,049 |
|
Визначення центру тяжіння окремої ланки та загального центра тяжіння тіла.
Загальний центр тяжіння тіла (ЗЦТ)– це уявна точка, до якої прикладена рівнодіюча сил тяжіння усіх ланок тіла.
Центр тяжіння (ЦТ)ланки визначають за відстанню її від осі проксимального суглобу (за радіусом центру ваги). Його виражають у відносних одиницях відносно довжини усієї ланки від проксимального сполучання. Експериментальним шляхом (О. Фішер, М. Бернштейн) визначені середні дані про вагу ланок тіла і про положення їх центрів тяжіння (табл. 3).
Таблиця 3 – Відносні ваги ланок тіла і розташування їх центрів тяжіння
|
Назва ланки |
Відносна вага |
Розташування ЦТ ланки (у відносних одиницях відстані від проксимального суглобу ) |
|
Голова Тулуб Плече Передпліччя Кисть Стегно Гомілка Стопа |
0,07 0,43 0,03 0,02 0,01 0,12 0,05 0,02 |
Над верхнім краєм слухового проходу На відстані 0,51 від плечової кістки На відстані 0,45 від плечового суглобу На відстані 0,43 від ліктьового суглобу На відстані 0,37 від зап’ястного суглобу На відстані 0,45 від стегнового суглобу На відстані 0,41 від колінного суглобу На відстані 0,44 від п’яти |
Знаючи маси ланок і їх радіуси центрів тяжіння, можна приблизно визначити положення ЗЦТ усього тіла. Він розташований, при основній стійці, в районі малого тазу, попереду хрестця (за М. Ф. Іваницьким). Положення ЗЦТ тіла потрібно знати при визначенні рівноваги людини на підпорі (або на підвісу), у водному середовищі, у стані спокою, а також під впливом повітря або води.
Для визначення центрів рівноваги тіла у спокої або при русі в середовищі важливо знати положення двох точок: центру об’єму і центру поверхні тіла.
Визначення центру об’єму тіла.
Центр об’єму (ЦО)тіла людини – це точка прикладення виштовхуючої сили при повному зануренні тіла під воду. Він співпадає з центром ваги води, яка була виштовхана у формі зануреного тіла.
Через те, що щільність тіла людини неоднакова, ЦО розташований зазвичай на декілька сантиметрів ближче до голови (при випрямленому положенні тіла), ніж ЗЦТ тіла. Завдяки цьому занурене під воду тіло людини у випрямленому положенні буде повертатися навколо поперечної осі ногами донизу.
Визначення центру поверхні тіла людини. Центр поверхні (ЦП)тіла людини – це точка прикладення рівнодіючої напору середовища при заданій позі тіла і його орієнтації відносно потоку (води чи повітря). Сила дії середовища, яка розташовується по той чи інший бік від ЗЦТ людини, зумовлює відповідне повертання тіла.
Визначення моменту інерції ланки тіладає уявлення про величину маси ланки і її розташування відносно заданої осі. Цей момент служить мірою інертності тіла. Приблизно моменти інерції довгих ланок кінцівок дорівнюють
0,3m.l(m– маса ланки, l– довжина ланки). Радіуси інерції відносно поперечної осі проксимального суглобу приблизно дорівнюють:
- 0,55 – для плеча;
- 0,50 – для передпліччя;
- 0,53 – для стегна;
- 0,50 – для гомілки.
Радіуси інерції є істотно більшими за радіуси ЦТ, тому в розрахунках не можна вважати їх однаковими.
Момент інерції тіла людинивідносно заданої осі визначається як сума моментів інерції усіх ланок тіла відносно тієї ж осі.
Мінімальний момент інерції – момент інерції відносно поздовжньої осі тіла, що проходить через його ЗЦТ. Направлена зміна моменту інерції широко використовується при управлінні обертальними рухами тіла.
Відомо, що життєдіяльність людини постійно супроводжується витратами енергетичних запасів, які і визначають важкість праці. Енергетичні втрати поновлюються харчуванням. Це необхідно для забезпечення постійного обміну енергії, тобто безперечною умовою життя. Життя людини постійно супроводжується безперервною витратою енергії. Навіть коли людина знаходиться у стані спокою, енерговитрати теж є – на роботу серця, інших органів та систем. Кількість такої енергії, що витрачається, дістала назву енергії основного обміну. Витрати енергії на основний обмін можуть коливатися залежно від статі, віку, стану центральної нервової системи, інтенсивності функцій ендокринної та ферментної систем та багатьох інших факторів.
Фізичні зусилля, що витрачаються людиною в її трудовій діяльності, оцінюються у формі енергетичних затрат (вимірюються в кДж/хв., кДж/год. або кКал/хв. чи кКал/год.). Їх величина залежить від інтенсивності навантаження. Так, наприклад, при фізичній праці добові енерговитрати перевищують 115 кКал/год. Витрата енергії в багатьох випадках залежить від рівня механізації виробництва. Якщо воно повністю автоматизоване, то енергетичні витрати робітників наближаються до енергозатрат осіб, що займаються розумовою працею.
Величина добових енерговитрат залежить від характеру роботи та фізичного навантаження:
– при розумовому виді діяльності – не більше 2,5 тис. кКал на добу;
– при середній фізичній праці – 3200 кКал на добу;
– при тяжкій фізичній праці та активному способі життя вони досягають 4 тис. кКал на добу та більше.
Добові енерговитрати залежать також і від віку людини. Так, наприклад, у похилому віці (коли людина на пенсії і веде малорухомий спосіб життя) добова витрата енергії може сягати 2300 кКал на добу; для людей молодих та середнього віку добові енергозатрати до сягають 6 тис. кКал на добу.
На будь-яку діяльність людини значно впливають успіх або невдача. В одних випадках успіх, “піднімаючи» людину у власних очах, мобілізує сили на досягнення нових цілей у роботі, а в інших – може викликати самоспокій. Невдача ж у справі, до якої людина відноситься позитивно, викликає пригнічений стан. Залежно від якостей особистості неприємні почуття можуть викликати або відмову від подальшої діяльності в певній області, або послідовний аналіз причин невдачі та нові зусилля виконати ту чи іншу справу.
Успіх у роботі залежить від багатьох обставин. Однією з них виступає творчість. Пошук нового в праці характерний лише для творчої особистості. Творчість піднімає діяльність на вищий щабель, є рушійною силою виробництва та науки. У творчості відбувається злиття фізичних та розумових сил, що повністю розкриває особистість, дозволяє їй самовиражатися.
Питання для самоперевірки
- Що таке біомеханічна система?
- Що таке момент часу?
- Що таке тривалість руху?
- Як характеризується інерційні характеристики?
- Що таке мінімальний момент інерції?